This is the introduction to the RoboBricks projects. It is currently work in progress.
The RoboBricks project provides a bunch of sensory and control modules that can be easily plugged together to form interesting robot systems. Indeed, they can be attached together with some plastic Lego® bricks to build robots, just like the Lego MindStorms® product. (Hence, the name RoboBricks.)
The basic concept behind RoboBricks is based on the small family of chips sold by FerretTronics®. The differences between RoboBricks and the FerretTronics chips are 1) RoboBricks support two way communication between the RoboBricks whereas the FerretTronics chips only offer one-way communication and 2) RoboBricks are at the printed circuit board level, whereas the FerretTronics products are at the chip level.
The current batch of RoboBricks are based around the PIC12Cxx 8-pin OTP (One Time Programmable) embedded microcontroller chips from Microchip®. From DigiKey®, the quantity 1 price is less than $2.00 a chip and the quantity 25 price is about $1.00 each. These chips do not have hardware UART's (Universal Asynchronous Receiver/Transmitter) in them, but a 2400 baud link can be emulated in firmware.
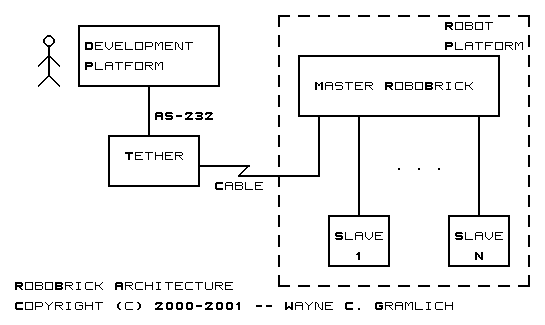
The overall RoboBrick architecture is shown below:
Bascially all software is developed on a full 32-bit development platform such as Windows®, MacOS®, or some flavor of Unix® (e.g. Linux®, Solaris®, BSD®, etc.) An RS-232 cable connects to a Tether RoboBrick which connects to the master RoboBrick via a 4 write cable. After the master RoboBrick has been programmed, the tether cable can be disconnected. The master RoboBrick is responsible for sending and commands and receiving data back from the slave robobricks.
When the master RoboBrick runs out of slave RoboBrick connections, processing power, or bandwidth, the robot platform can be repartioned to have two or more master RoboBricks with another supreme master RoboBrick in control of the masters. Thus, master RoboBricks can be cascaded in a hierarchical fashion.